For working professionals
For fresh graduates
- Study abroad
More
- Post Graduate Certificate in Data Science & AI (Executive)
- Gen AI Foundations Certificate Program from Microsoft
- Gen AI Mastery Certificate for Data Analysis
- Gen AI Mastery Certificate for Software Development
- Gen AI Mastery Certificate for Managerial Excellence
- Gen AI Mastery Certificate for Content Creation
- Post Graduate Certificate in Product Management from Duke CE
- Human Resource Analytics Course from IIM-K
- Global Master Certificate in Integrated Supply Chain Management
- Gen AI Foundations Certificate Program from Microsoft
- CSM® Certification Training
- CSPO® Certification Training
- PMP® Certification Training
- SAFe® 6.0 Product Owner Product Manager (POPM) Certification
- Post Graduate Certificate in Product Management from Duke CE
- Professional Certificate Program in Cloud Computing and DevOps
- Python Programming Course
- Executive Post Graduate Programme in Software Dev. - Full Stack
- AWS Solutions Architect Training
- AWS Cloud Practitioner Essentials
- AWS Technical Essentials
- The U & AI GenAI Certificate Program from Microsoft
Linear Algebra Courses
Linear algebra is one of the fundamental branches of mathematics that deals with studying linear equations and their representation in the vector space using matrices.
-80f5aca04e9b49ca9902fe2806c12f6e%20(1)-05c9b5b2614c40b681f04c3275487b40.jpeg&w=3840&q=75)
Linear Algebra Course Overview
Linear algebra is one of the fundamental branches of mathematics that deals with studying linear equations and their representation in the vector space using matrices. It is the study of vector spaces and linear transformations.
Linear functions, the system of linear equations, vector spaces, vectors, matrices, and linear transformation are the critical concepts in this branch of mathematics. Broadly, vectors are elements that we can add, and linear functions are functions of vectors that respect vector addition. A matrix emerges when the information related to linear functions is arranged in an organized form.
Linear algebra is one of the most important mathematical tools. It is essential in pure and applied mathematics alike. Linear algebra is also widely applicable in several fields such as physics, engineering, economics, computational science, and natural sciences. Linear algebra is one of the most valuable branches of mathematics today. An introduction to linear algebra is the building block to understanding many unknowns in the sciences.
What does it mean for vectors to be orthogonal?
In vector geometry, two or more vectors are orthogonal if they are perpendicular to each other. In other words, the dot product they yield is always zero.
What is a vector subspace?
A vector space V is a collection of objects with a (vector) defined as having two operations, addition and scalar multiplication. Vector addition combines two vectors, u and v, into a single vector u + v. Scalar multiplication is a way of combining scalar, k, with a vector, v, to end up with the vector kv.
Vector spaces are subject to the following ten axioms:
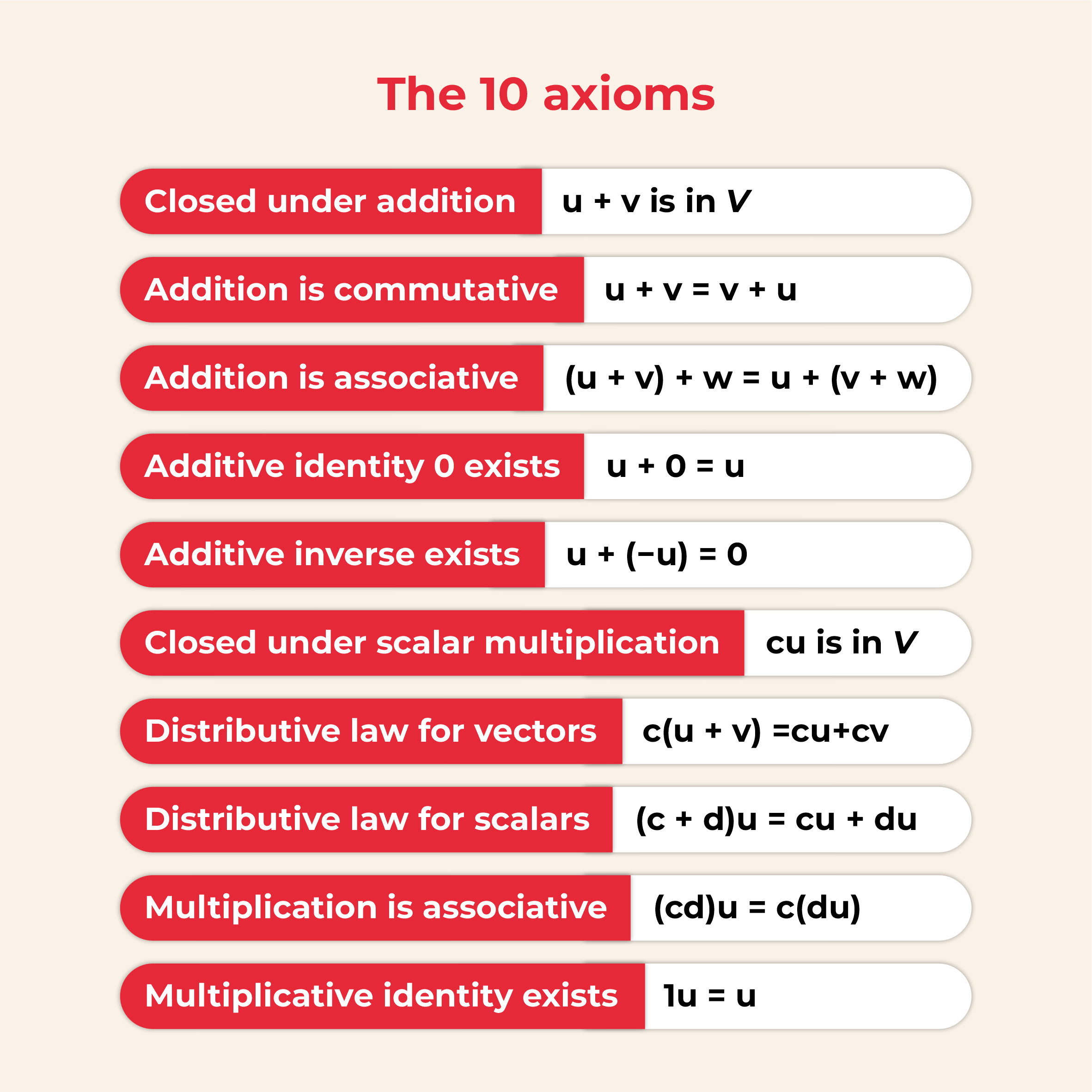
1. Closed under addition: u + v is in V.
2. Addition is commutative: u + v = v + u.
3. Addition is associative: (u + v) + w = u + (v + w)
4. Additive identity 0 (called the zero vector) e
5. xists: u + 0 = u.
6. Additive inverse −v exists: u + (−u) = 0.
7. Closed under scalar multiplication: cu is in V.
8. Distributive law for vectors: c(u + v) =cu+cv.
9. Distributive law for scalars: (c + d)u = cu + du.
10. Multiplication is associative: (cd)u = c(du).
11. Multiplicative identity exists: 1u = u.
A vector subspace S of a vector space V is a nonvoid subset of V and is a vector space in its own right, following under defined operations of the same addition and scalar multiplication. A subspace S of a vector set V is a working set that allows the original data set V to shrink into a smaller data set S.
A row vector vs. A column vector
Row vector and column vector are part of a rectangular array of values or elements. A matrix M has a rows and b columns. A vector v, when treated as a matrix, has either one row or one column.
Let us understand what is a row vector and a column vector.
1. A row vector is an ordering of collection of numbers written in a row or horizontally. Example of a row vector is: x=x₁, x₂,........xₙ.
2. A column vector is an ordering of collection of numbers written in a column (vertically).
What is an orthonormal basis?
If every element of a vector space can be written as a linear combination of some vectors and the vectors are independent of each other it is a basis. A basis must fulfil two conditions. First, it should have linear independence. Secondly, they must span the whole space.
Now, let us understand what is an orthonormal basis. A basis is orthonormal if all of its vectors have a norm (length) of 1. Additionally, all the vectors should be orthogonal (perpendicular) to each other with an inner product of 0.
Let us begin by learning what exactly a matrix is. In linear algebra, a matrix is a rectangular array of numbers, symbols or expressions (or other mathematical elements). It means that a matrix is an 𝑚 × 𝑛 array of scalars from a given field 𝐹. These are called elements or entries and are arranged in rows or columns. We can identify each entry by the row and column in which it lies. When the number of rows is equal to the number of columns of a matrix, it is a square matrix.
Let’s move on to exploring matrix operations. There are two primary matrix operations: matrix addition and scalar multiplication of matrices. In matrix addition, if matrices A and B are of the same size, the sum of the matrices is a matrix. It is important to note that only matrices of the same size can be added. Additionally, the notion of subtracting matrices is similar to matrix addition. In this case, matrix subtraction is the operation of subtracting two matrices of the same size.
In matrix scalar multiplication, if a matrix 𝐴 is multiplied by a scalar 𝑘, then all the matrix elements will be multiplied with the scalar. Matrix multiplication is a vital operation in linear algebra. It is the process of multiplying matrices. Matrix multiplication is possible only if two matrices (𝐴 and 𝐵) are compatible, i.e., the number of columns in 𝐴 is equal to the number of rows in 𝐵. Further, matrix multiplication is not commutative, meaning that the order of matrices is critical in this operation.
Eigenvectors are non-zero vectors that do not change their orientation but only their scale depending on their corresponding eigenvalue. A scalar λ is an eigenvalue of matrix 𝐴 if there is a solution x of 𝐴x = λx; such an x is called an eigenvector corresponding to λ.
The similarity transformation converts the matrix representation of a general linear transformation from one frame to another. The following equation can define similarity transformation: 𝐴 = 𝑃⁻¹𝐵𝑃. Here, 𝐴, 𝑃, and 𝐵 are square matrices. 𝐴 and 𝐵 are similar if we find a non-singular 𝑛×𝑛 matrix 𝑃 which fulfills the 𝐴 = 𝑃⁻¹𝐵𝑃 equation.
Quadratic forms like linear functions have matrix representation. When matrix 𝐴 denotes an 𝑛 x 𝑛 symmetric matrix with entries and x represents an 𝑛 x 1 column vector, Q = x’𝐴x is said to be a quadratic form.
Quadratic forms can be classified as follows:
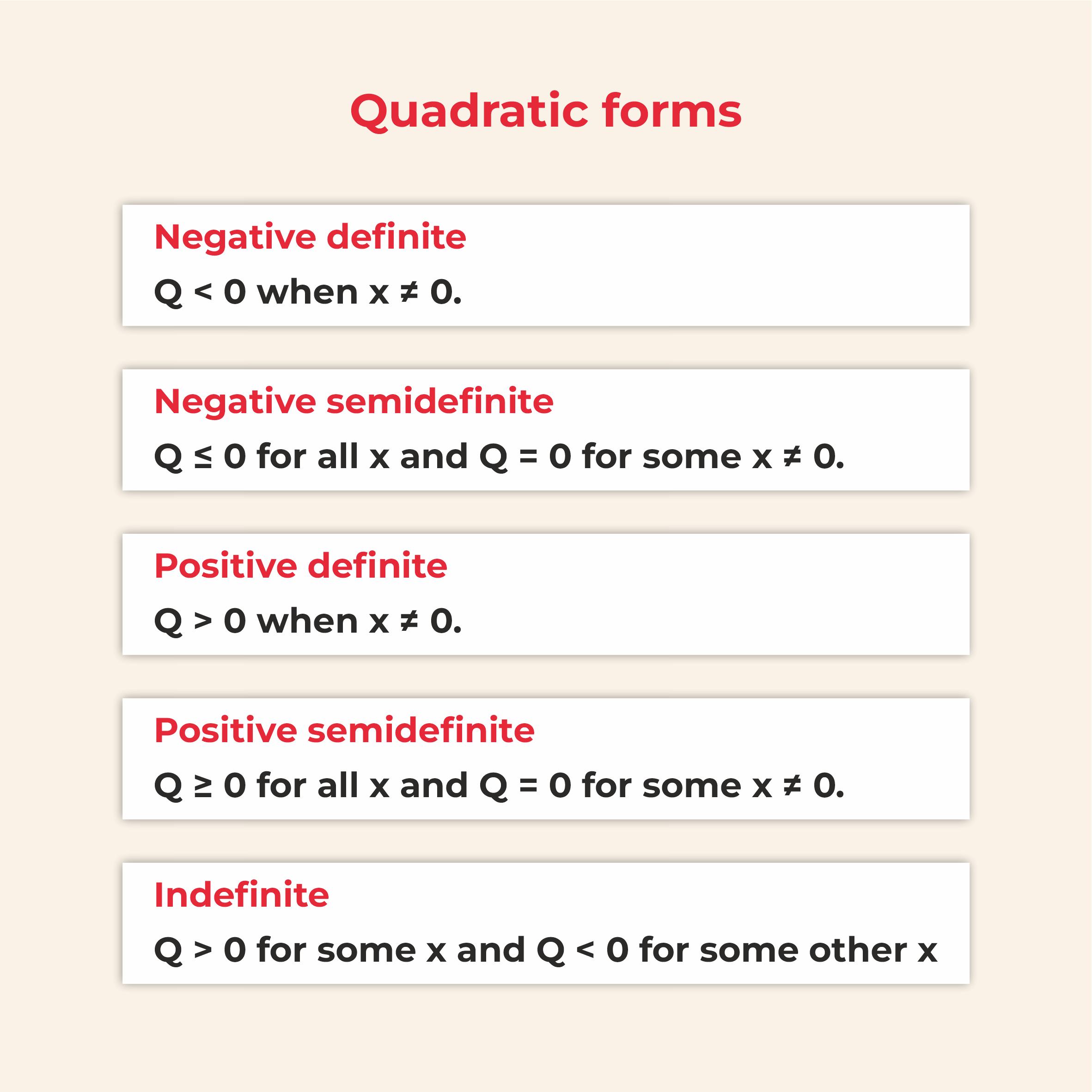
1. negative definite: Q < 0 when x ≠ 0.
2. negative semidefinite: Q ≤ 0 for all x and Q = 0 for some x ≠ 0.
3. positive definite: Q > 0 when x ≠ 0.
4. positive semidefinite: Q ≥ 0 for all x and Q = 0 for some x ≠ 0.
5. indefinite: Q > 0 for some x and Q < 0 for some other x.

Best Data Science Courses
Programs From Top Universities
upGrad's data science degrees offer an immersive learning experience. These data science certification courses are designed in collaboration with top universities, ensuring industry-relevant curriculum. Learners from our data science online classes gain insights into big data & ML technologies.
Data Science (0)
Loading...
upGrad Learner Support
Talk to our experts. We are available 7 days a week, 9 AM to 12 AM (midnight)
Indian Nationals
1800 210 2020
Foreign Nationals
+918045604032
Disclaimer
1.The above statistics depend on various factors and individual results may vary. Past performance is no guarantee of future results.
2.The student assumes full responsibility for all expenses associated with visas, travel, & related costs. upGrad does not provide any a.